基于ROS melodic底盘控制器+STM32的一个2D激光SLAM自主导小车完整源码+项目资料+演示视频.zip基于ROS melodic底盘控制器+STM32的一个2D激光SLAM自主导小车完整源码+项目资料+演示视频.zip基于ROS melodic底盘控制器+...
”stm32 激光SLAM自主导小车 ROSmelodic C 源码“ 的搜索结果
基于ROS melodic底盘控制器+STM32的一个2D激光SLAM自主导小车完整源码+项目资料.zip基于ROS melodic底盘控制器+STM32的一个2D激光SLAM自主导小车完整源码+项目资料.zip基于ROS melodic底盘控制器+STM32的一个2D激光...
基于ROS melodic底盘控制器+STM32的一个2D激光SLAM自主导小车完整源码+项目资料+演示视频 - 不懂运行,下载完可以私聊问,可远程教学 该资源内项目源码是个人的毕设,代码都测试ok,都是运行成功后才上传资源,答辩...
基于STM32的SLAM机器人移动底盘源码及资料(可运行于ROS平台).zip基于STM32的SLAM机器人移动底盘源码及资料(可运行于ROS平台).zip 基于STM32的SLAM机器人移动底盘源码及资料(可运行于ROS平台).zip基于STM32的SLAM...
工控机:Intel_up_core,底盘控制器:STM32F103ZETA6,STM32F103C8T6,传感器:USB2.0_720PCamera 思岚A1 激光雷达
智能小车 slam pid 控制 机器人 stm 32 源码
STM32 智能小车源代码
标签: ROS开发
STM32智能小车的源代码分享,包括launch文件,src中含有激光slam的源文件,不需要编译,可以直接用
包括STM32、ESP8266、PHP、QT、Linux、iOS、C++、Java、python、web、C#、EDA、proteus、RTOS等项目的源码。 【项目质量】: 所有源码都经过严格测试,可以直接运行。 功能在确认正常工作后才上传。 【适用人群】...

主要目的本人平时研究slam算法,比如激光导航,动态路径规划,以及其它上层业务以及外围驱动相关的开发。其中会很多的理论和实际应用会用到ros系统中的一些开源的软件包,所以希望借助于ros平台能够快速的验证和实现...
包括STM32、ESP8266、PHP、QT、Linux、iOS、C++、Java、python、web、C#、EDA、proteus、RTOS等项目的源码。 【项目质量】: 所有源码都经过严格测试,可以直接运行。 功能在确认正常工作后才上传。 【适用人群】...
出于成本考虑,只购买了维航科技的小车底盘(含STM32F1板和底盘、电机、电机驱动板、摄像头等),其他的零件重用自己原来的(如树莓派、激光雷达); 目标: 目的1:在此底盘之上,组装一辆SLAM小车,能够进行基本...

文章目录TX2 与 STM32f103 硬件连接ROS 工作环境配置创建工作空间编译工作空间创建功能包配置功能包程序依赖第三方库键盘控制 ROS 包控制程序修改 CmakeLists.txt编译并执行参考 TX2 与 STM32f103 硬件连接 ||| |-|-...
ROS自主建图导航小车项目实践
无人驾驶–实时定位与地图构建(SLAM)仿真与实战(附源码) 一个SLAM的技术小结,供自己回顾也为...硬件平台:智能车平台、多线激光雷达、工控机、stm32、车身转角传感器和轮速传感器 软件平台:Ubuntu16.04、ROS ...
开源自主导航小车MickX4(十)总结参考资料 参考资料 欢迎大家点赞在评论区交流讨论([email protected]) O(∩_∩)O 或者加群交流(1149897304)


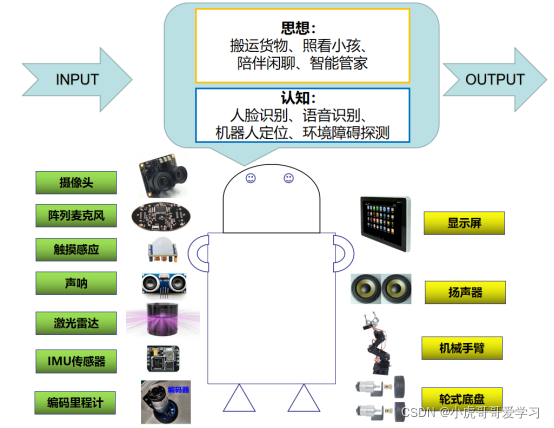
试想一下如果人类拥有一个非常聪明的脑瓜子但却被限制在固定的地方不能移动,那么人与人之间的交流将很大程度地被阻断,人类的分工协作、社会生产、认识并改造自然的能力也将不复存在。可以说人类的躯体延展了人类的...
Vue : 56.38% JavaScript : 22.25% Less : 14.81% 1003 ↑ doc《SpringBoot 中间件设计和开发》 专栏描述,概要介绍、源码使用、Issue提交、学习反馈、技术交流、代码合并,你想要的都有!0004 ↑ android-...

教程文档目录目录备注:如小图看不清楚,双击即可放大查看(手动狗头)主要目的本人平时研究slam算法,比如激光导航,动态路径规划,以及其它上层业务以及外围驱动相关的开发。其中会很多的理论和实际应用会用到ros...
底盘的阿克曼,反阿克曼,麦克纳姆,差速 ,全向轮运动学正解逆解,stm32源码 底层包括原理图 以及驱动板源码 上层包括cartographer gmapping Hector karto等开源算法的全部部署,视觉slam 的orb slam2源码 A*及...
先自我介绍一下,小编浙江大学毕业,去过华为、字节跳动等大厂,目前阿里P7深知大多数程序员,想要提升技能,往往是自己摸索成长,但自己不成体系的自学效果低效又漫长,而且极易碰到天花板技术停滞不前!...
基于ROS系统的自主避障小车搭建参考资料集合Diego Robot系列机器人开发目录 Diego Robot系列机器人开发目录 原文网站链接:http://www.diegorobot.com Lesson 1: 硬件清单 Lesson 2: 硬件连接图 Lesson 3: 软件架构...

深度学习、机器人开发、嵌入式开发、软件开发
推荐文章
- withRouter,非根组件获取路由参数_withrouter 只能取到路由中的一个参数-程序员宅基地
- ubuntu环境下QT5操作摄像头报错,cannot find -lpulse-mainloop-glib cannot find -lpulse cannot find -lglib-2.0_cannot find–lpulse-程序员宅基地
- 用jbpm_bpel学jwsdp的ant方式使用-程序员宅基地
- 输入数字判断星期几_html获取当前星期几-程序员宅基地
- SpringBoot整合Activiti7——实战之放假流程(会签)_activit7中会签-程序员宅基地
- 阿里云服务器收到挖矿病毒的攻击,导致基础的文件被病毒污染的问题和对应的处理解决方法-程序员宅基地
- 北京东城区空调维修办法,格力变频空调出现ph,到底是怎么回事?_格力变频空调ph代码-程序员宅基地
- vscode编辑器使用拓展插件background添加背景图片改变外观_background vscode-程序员宅基地
- android 简单打电话程序_android拨打电话的程序-程序员宅基地
- 第二届中国(泰州)国际装备高层次人才创新创业大赛_泰州市双创人才计划2022-程序员宅基地